
Quand j'utilisais un Arduino avec le shield, un simple jump en EN et GND suffisait, pas nécessaire de les brancher.
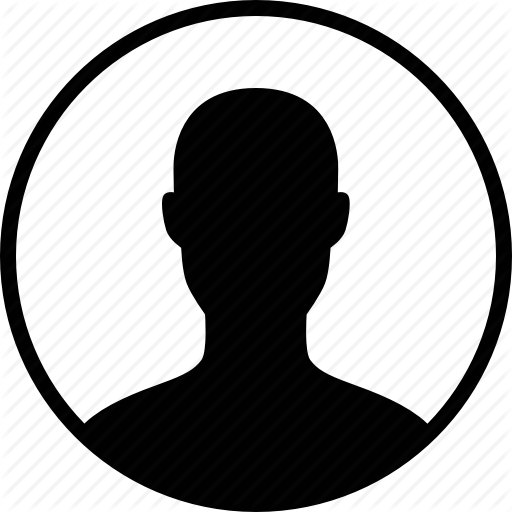
Bonjour, je reviens sur le câblage des drivers DM 542Y, Est que ça va en enlevant les jumpers pour la reproduction axe Y et axe A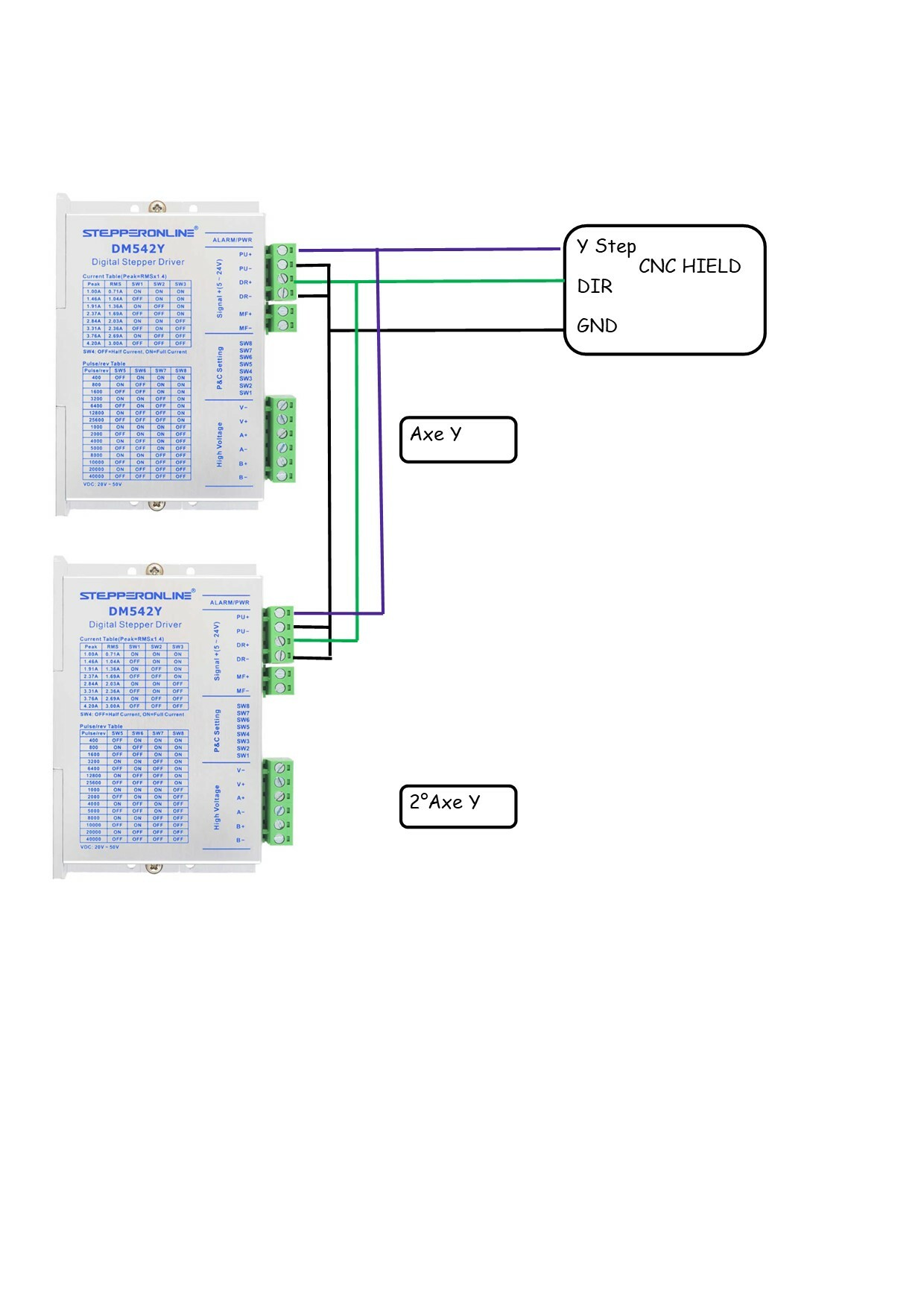
S
Bonjour Khinyo, merci pour tes renseignements.
Comme une image parle plus que des écrits, que vaut cette config ?
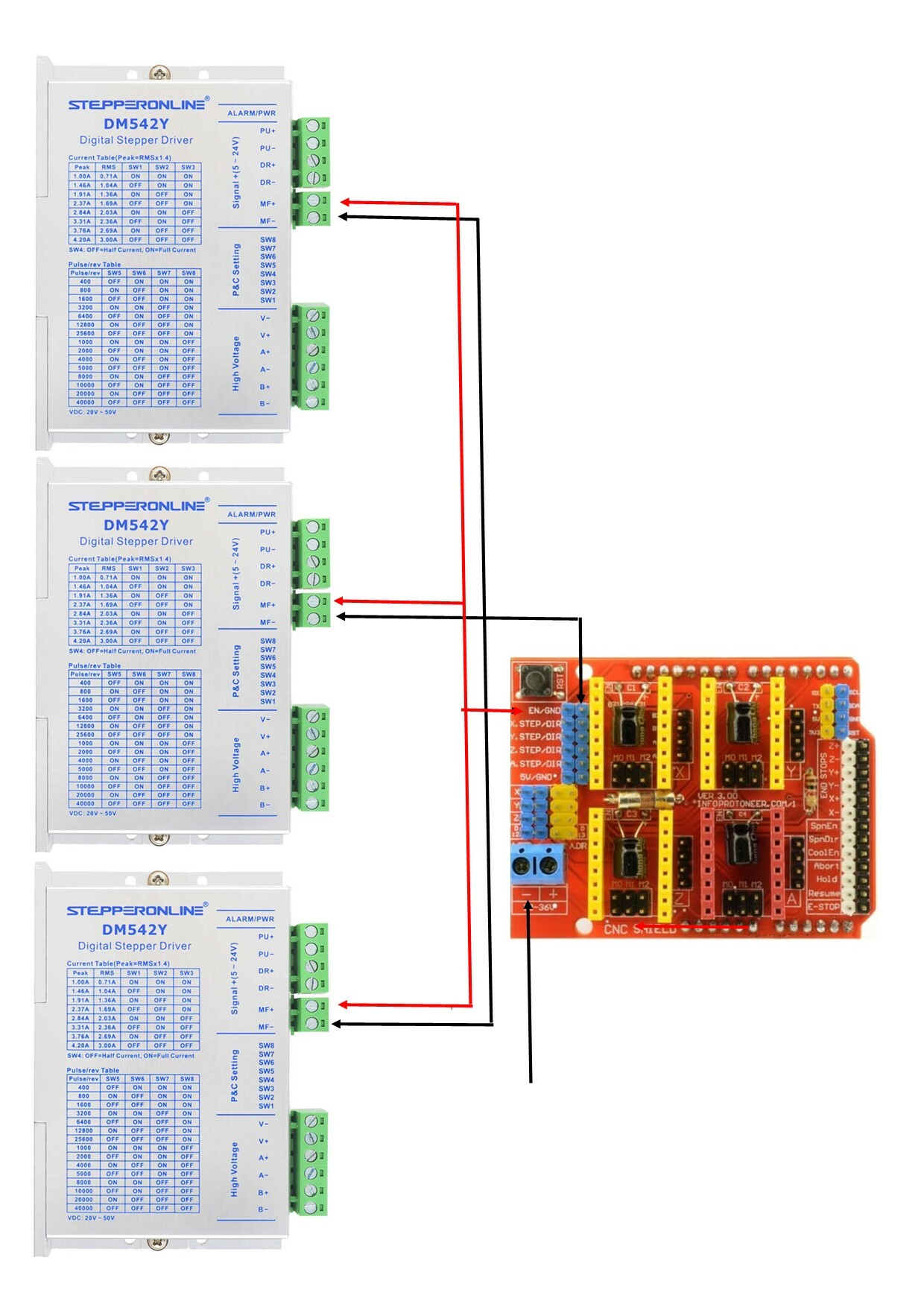
Ok khinyo je vais essayer cette config
Bonjour,
Après avoir réinitialisé l'arduino et enlevé le shield, les moteurs tournent bien dans un sens, mais grognent et tournent dans le même sens quand on envoie la commande inverse.
Le même phénomène se reproduit sur chaque moteur !
Puis lorsque tous les moteurs furent câblés et bien ils tournent tous en même temps.
Je pense que le fichier GRBL n'est pas bien paramétré.
Bon il y a du mieux.
Bonne journée.
Hello Khinyo,
Fatche de c.. comme ils disent à Marseille ça marche, j’ai simplement remis la masse sur l’Arduino,
reste à peaufiner le fichier GRBL.
Pour l’instant ; quand je demande une valeur de 50 mm aux axe Y et X ils se déplacent que de 20 mm et l’axe Z valeur demandée 20 mm le déplacement n’est que de 8 mm.
Voilà le fichier GRBL. Le moteur 17 chauffe un peu !
CNCjs 1.9.22 [Grbl]
Connected to COM5 with a baud rate of 115200
Grbl 1.1h ['$' for help]
client> $$
$0=10 (Step pulse time, microseconds)
$1=25 (Step idle delay, milliseconds)
$2=0 (Step pulse invert, mask)
$3=0 (Step direction invert, mask)
$4=0 (Invert step enable pin, boolean)
$5=0 (Invert limit pins, boolean)
$6=0 (Invert probe pin, boolean)
$10=1 (Status report options, mask)
$11=0.010 (Junction deviation, millimeters)
$12=0.002 (Arc tolerance, millimeters)
$13=0 (Report in inches, boolean)
$20=0 (Soft limits enable, boolean)
$21=0 (Hard limits enable, boolean)
$22=0 (Homing cycle enable, boolean)
$23=3 (Homing direction invert, mask)
$24=25.000 (Homing locate feed rate, mm/min)
$25=500.000 (Homing search seek rate, mm/min)
$26=250 (Homing switch debounce delay,
milliseconds)
$27=1.000 (Homing switch pull-off distance,
millimeters)
$30=1000 (Maximum spindle speed, RPM)
$31=0 (Minimum spindle speed, RPM)
$32=0 (Laser-mode enable, boolean)
$100=100.000 (X-axis travel resolution, step/mm)
$101=100.000 (Y-axis travel resolution, step/mm)
$102=100.000 (Z-axis travel resolution, step/mm)
$110=2000.000 (X-axis maximum rate, mm/min)
$111=2000.000 (Y-axis maximum rate, mm/min)
$112=2000.000 (Z-axis maximum rate, mm/min)
$120=200.000 (X-axis acceleration, mm/sec^2)
$121=200.000 (Y-axis acceleration, mm/sec^2)
$122=200.000 (Z-axis acceleration, mm/sec^2)
$130=200.000 (X-axis maximum travel, millimeters)
$131=200.000 (Y-axis maximum travel, millimeters)
$132=200.000 (Z-axis maximum travel, millimeters)
ok
Bonjour,
J'essaye de câbler des nema23 sur des tb6600, mais j'ai du mal à différencier les câble A+,A-,B+,B-, sur le moteur.
Est ce que quelqu'un pourrait m'aider ?
Bonjour un petit lien en faisant une recherche rapide sur internet :
https://www.omc-stepperonline.com/nema-23-stepper-motor/e-series-nema-23-bipolar-1-8deg-3-0-nm-425oz-in-4-2a-57x57x113mm-4-wires.html
Ya encore plus simple
Tu prends deux fils et les court-jus. Tu essaies de tourner le moteur. Si ça résiste, c'est une paire. Sinon tu change un des deux fils et tu réessaies. Tu as alors une des deux paires.