Nema 23 + CNC Shield + TB6600 🇫🇷
Hello,
Après avoir passé plus de 3 heures sur la question, passé en revue toutes les videos YT que j'ai pu trouver, j'espère enfin trouver la solution à mon problème ici.
Pour commencer, mon matos:
- Arduino Uno (clone Geekcreit et un autre UNO dont j'ignore la marque mais qui était livré avec mon kit Banggood)
- kit Bangood composé de :
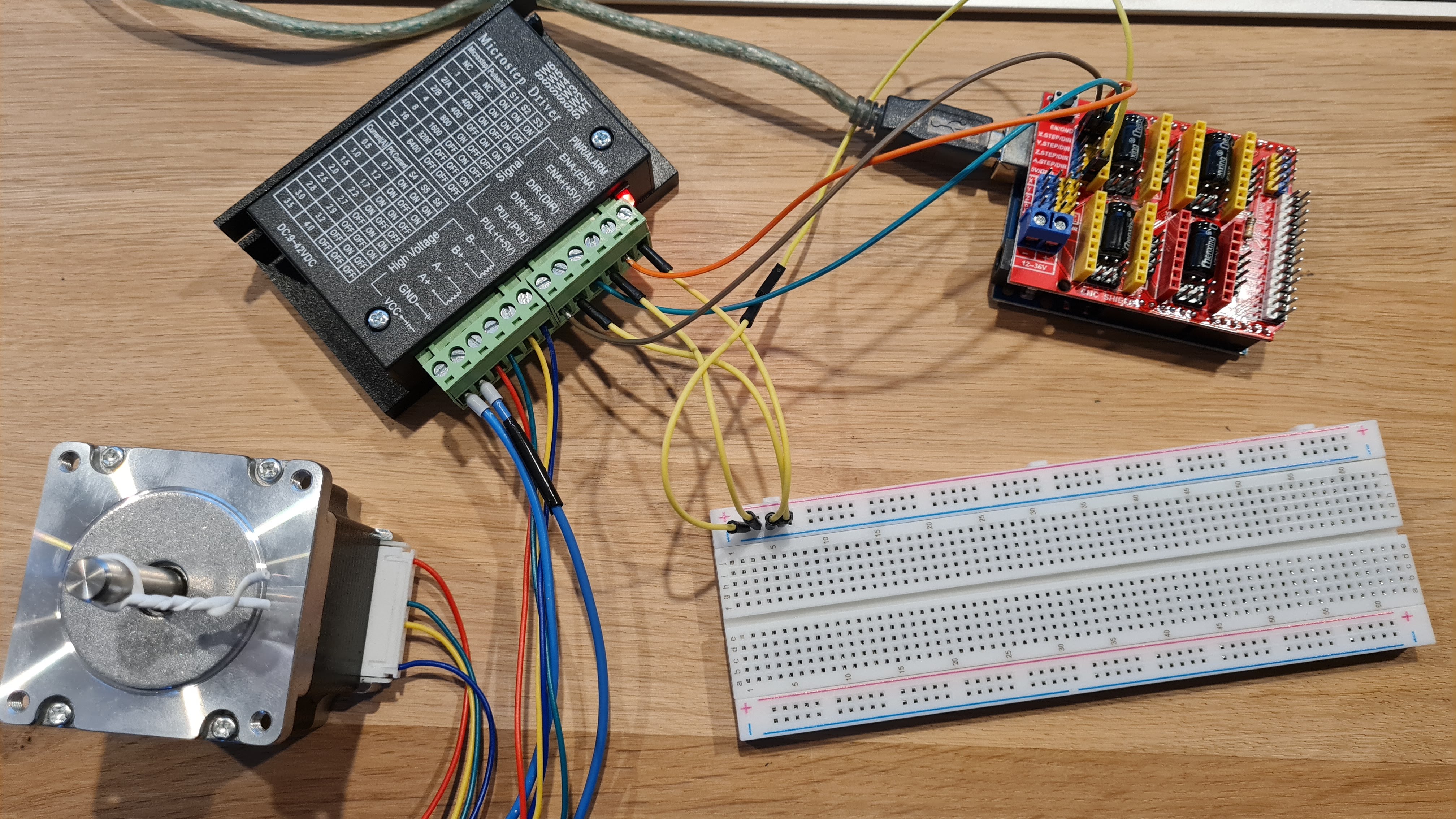
- 4 moteurs Nema 23 Usongshine 23HS5628 diam 8 https://www.aliexpress.com/item/32789295890.html
- Arduino (clone je pense)
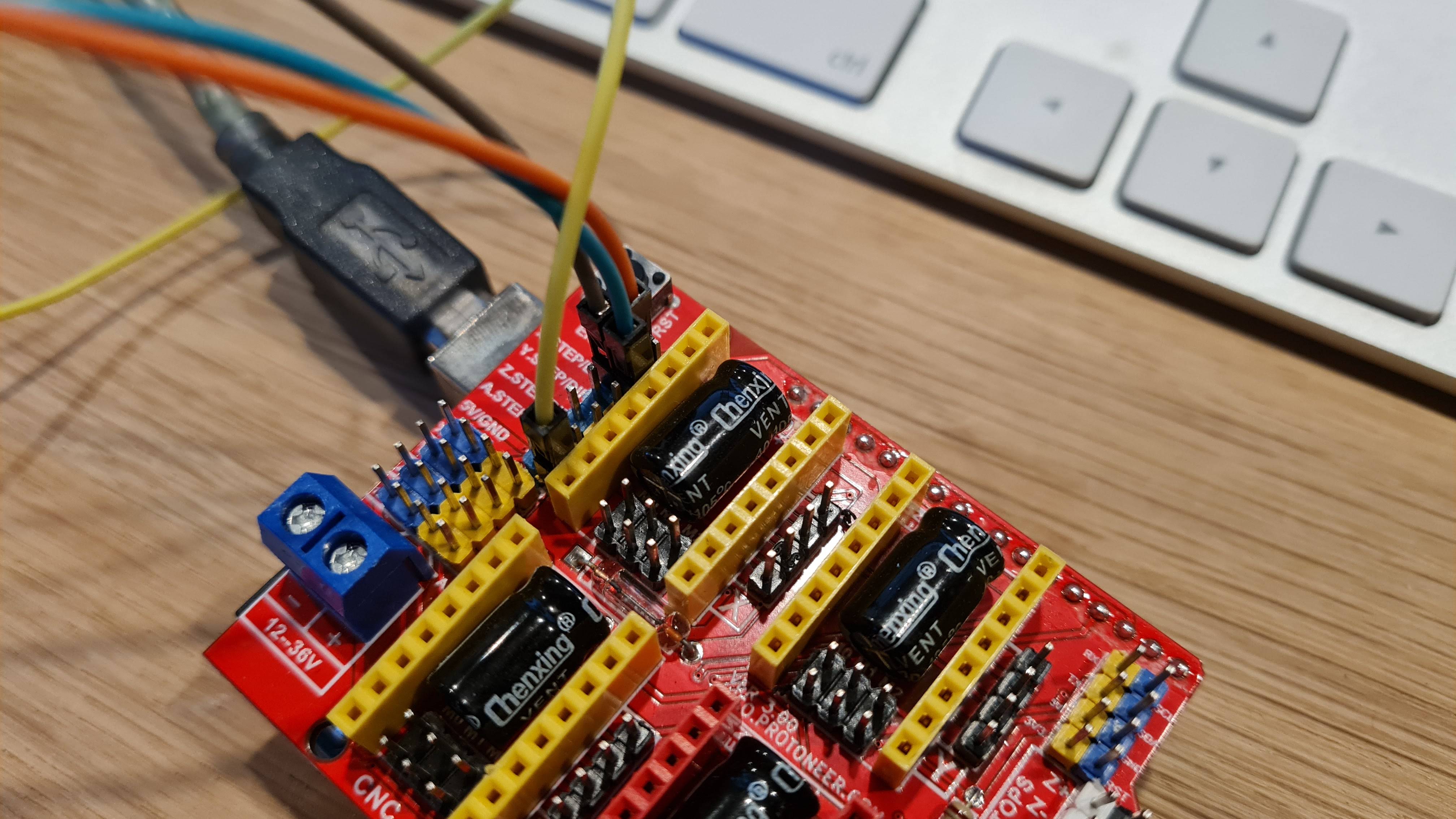
- CNC Shield
- Stepper drivers TB6600
J'ai aussi une alimentation 12V 20A.
Alors, dans l'ordre, j'ai :
- installé la librairie sur l'Arduino (j'ai essayé les 2 cartes, toutes 2 avec succès)
- téléchargé CNCjs, qui communique parfaitement avec les Arduino
- monté la CNC Shield sur l'Arduino
- connecté les masses ensemble
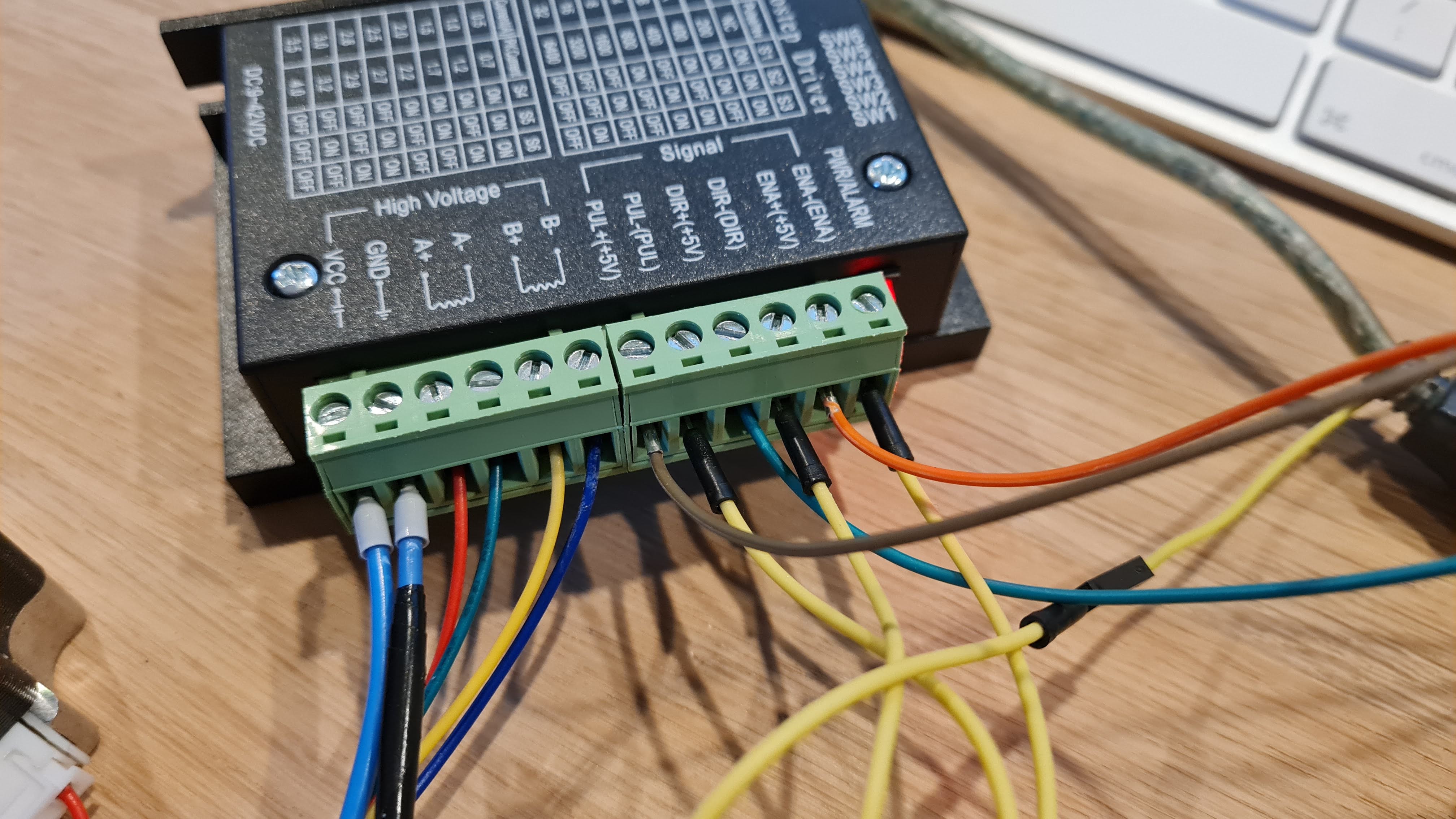
- connecté le moteur sur le stepper en suivant les codes couleurs trouvé sur Aliexpress (lien plus haut)
- connecté le PUL+5V sur le X.Step
- connecté le DIR+5V sur le X.Dir
- connecté les masses à une masse du CNC Shield
- mis les switches du stepper sur 16/3200 (j'ai aussi essayé d'autres vitesses pour voir) et 2.8A
j'ai vérifié mes câblages 20 fois, rien à faire, le moteur fait des petites vibrations mais ne se comporte pas correctement. J'ai essayé avec un autre moteur et un autre stepper, même chose.
J'ai aussi connecté directement sur l'Arduino, pas mieux.
j'ai essayé de mettre un jumper sur le EN/GND du CNC Shield, pas mieux.
Bref je crois vraiment avoir tout tenté, et ça ne marche toujours pas.
Une idée, quelqu'un ?
Merci !
Tu devrais maybe mettre quelques photos de détails....
quand je regarde ce qu'il se passe au niveau du stepper avec un multimètre et que je clique sur X+ ou X- dans CNCjs, j'obtiens :
- sur Dir+/- : 0 et 4,57v quand je change de sens, ce qui me fait penser que tout est bon de ce côté-là
- sur X.Step+/-: 0 et 0,02v quand je bouge en X (dans un sens comme dans l'autre). Est-ce normal ?
On a pas besoin d'installer les drivers et les jumpers de micro-stepping sur la CNC shield (a4988 ou drv8825)?
ben non, comme ils sont externalisés sur les drivers TB6600..
comme j'en ai marre de galérer, j'ai décidé de partir sur une solution baséé sur un Raspberry Pi 4 et ceci :
https://www.mybotshop.de/Raspberry-Pi-CNC-Hat avec le Driver Board externe... on verra bien

N'étant pas du tout un connaisseur du sujet et sachant que ça pourrait ne pas te servir, je prends une chance en te filant un lien à la méthode utilisée par Topsie.
Désolé d'avance si tu l'as déjà vu et ça n'aide pas!
En regardant de plus près ton câblage on peut voir que tu câbles les bornes EN+/EN- (un câble orange et un câble jaune) or Topsie dans la vidéo que met Jean-Robert Michel dit ne pas utiliser ces connexions sur le driver, il en enlève même ce bornier (la partie séparable) pour "condamner" ces connexions.
oui, j'ai essayé ça aussi, j'ai vu des tonnes de schémas sur différents sites/vidéos et certains ne les câblent pas, d'autres mettent un jumper, d'autres les câblent...
j'ai même vu des gars relier les +5V ensemble (mais ça j'ai pas voulu essayer :))